
SELF LEARNING ROBOTIC ARM PROTOTYPE
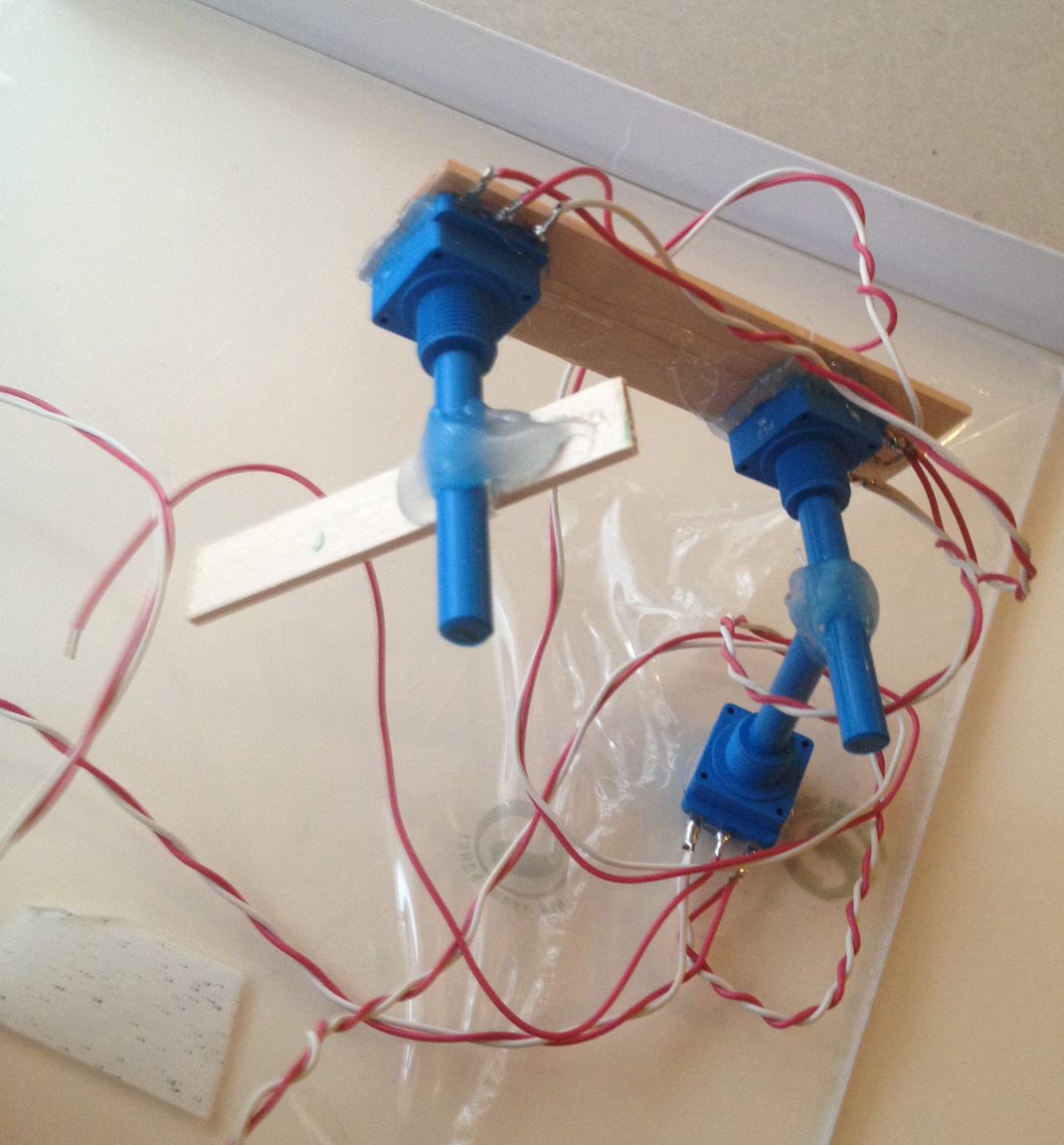
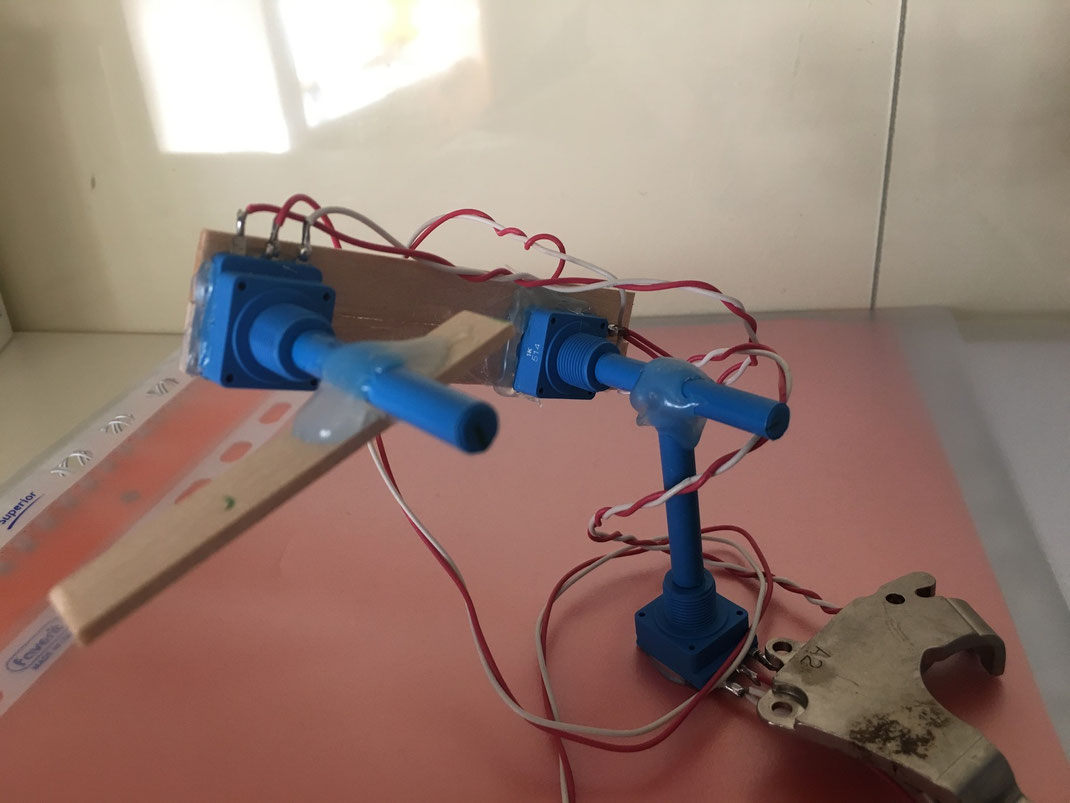
Arm position is controlled via a 2:1 scale model of the unit, whose movements are sampled via resistive encoders every few milliseconds. Motion scaling is be performed either via software or via the 2:1 proportions; hand shaking can be smoothed and maximum servos speeds can be software limited for added precision. Position sequences can be saved via a button press and executed automatically with servo speed control and acceleration.
The unit has been prototyped by soldering acrylic plates to servos bodies in the base and in the first arm section, reinforced in the middle with a X section acrylic support to prevent structural inflection under (very modest) loads. The gripper has been thrown together with hot glue and a modeled paperclip. Everything is controlled by an atmega processor.
A similar project can be found here (https://www.youtube.com/watch?v=bLnAJ-mSElE)