
3 DOF CYLINDRICAL COORDINATES GRIPPER ROBOT
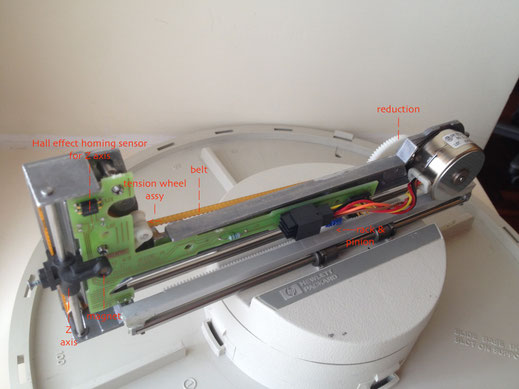
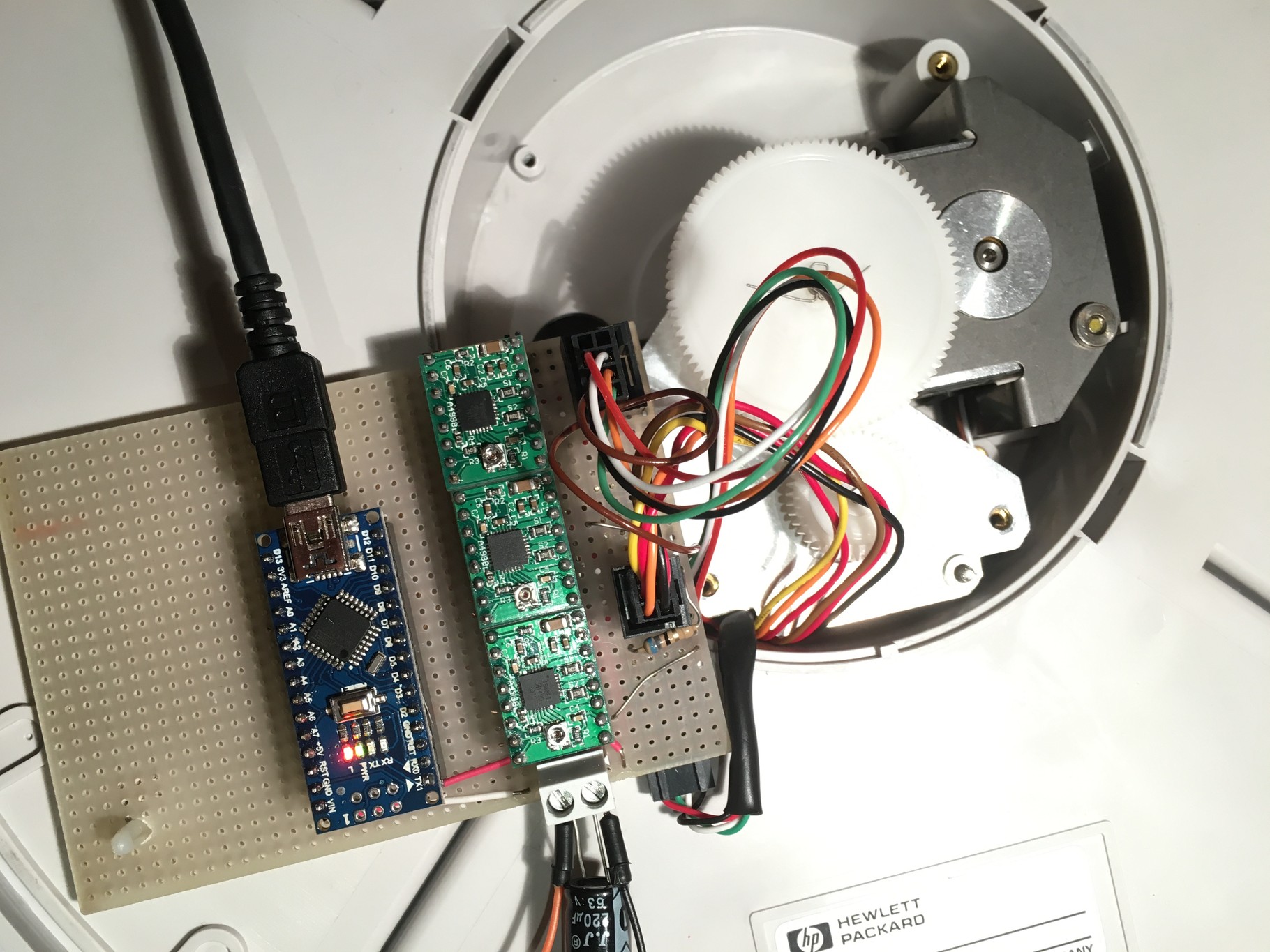
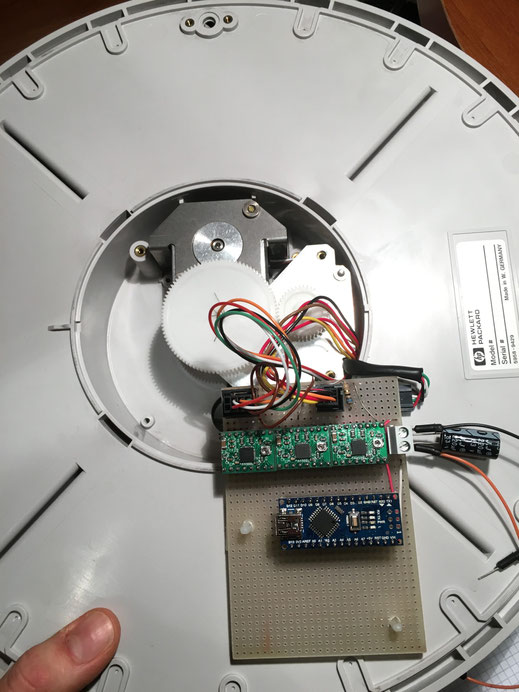
This unit has been retrieved from an HP HPLC autosampler, it has been restored and will be used for automation projects. In the base two stepper motors are coupled via two coaxial shafts, respectively to the rotating plate for the circular motion axis and to the horizontal linear axis, which is operated via a rack and pinion setup (46 steps/cm resolution). A third stepper on the horizontal arm controls the vertical axis via a pulley/belt. The steppers were all bipolar but i i'm controlling them with Allegro A4988 ICs. In the following video there is a homing routine test for the angular movement using an internal IR optointerrupter; the homing sequence has the robot first moving at full speed towards the activation point of the sensor, then moving some steps away from it and then slowly triggering it again; finally the arm is moved from 0 to the maximum step limit at full speed and acceleration.